Projects
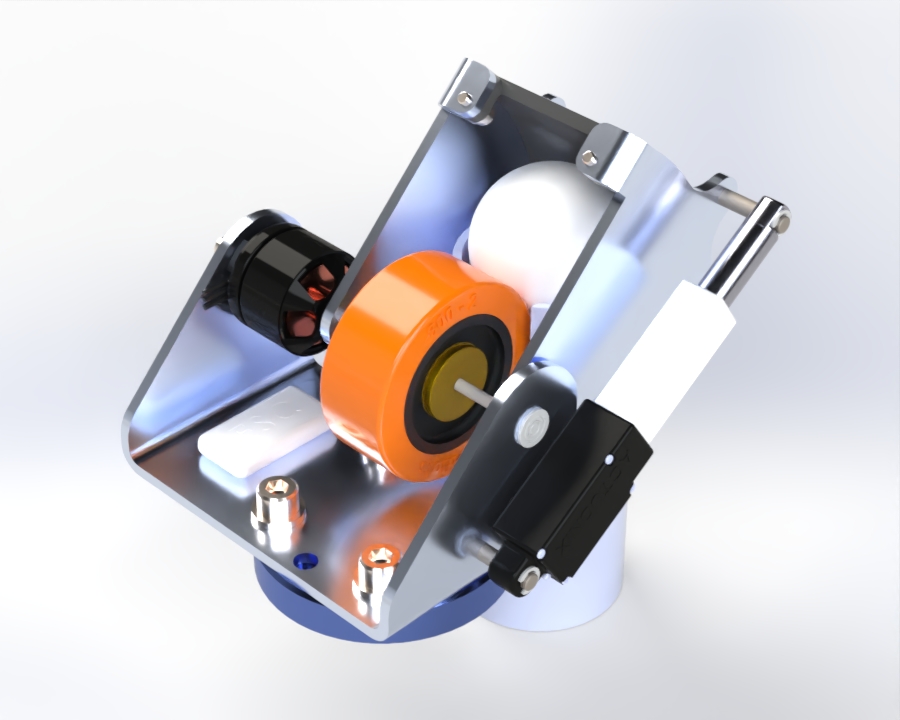
Ping-Pong Ball Launcher
Robot-mountable variable-angle launcher with single-flywheel + hood architecture, designed from first-principles physics and a Python trajectory model.
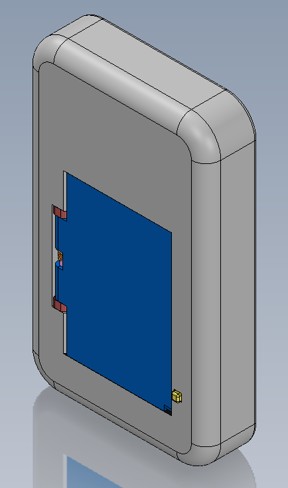
Battery Door Mechanism
Spring-loaded latch mechanism for a compact stainless steel housing with force-direction conversion, auto-latching, and full stress validation.
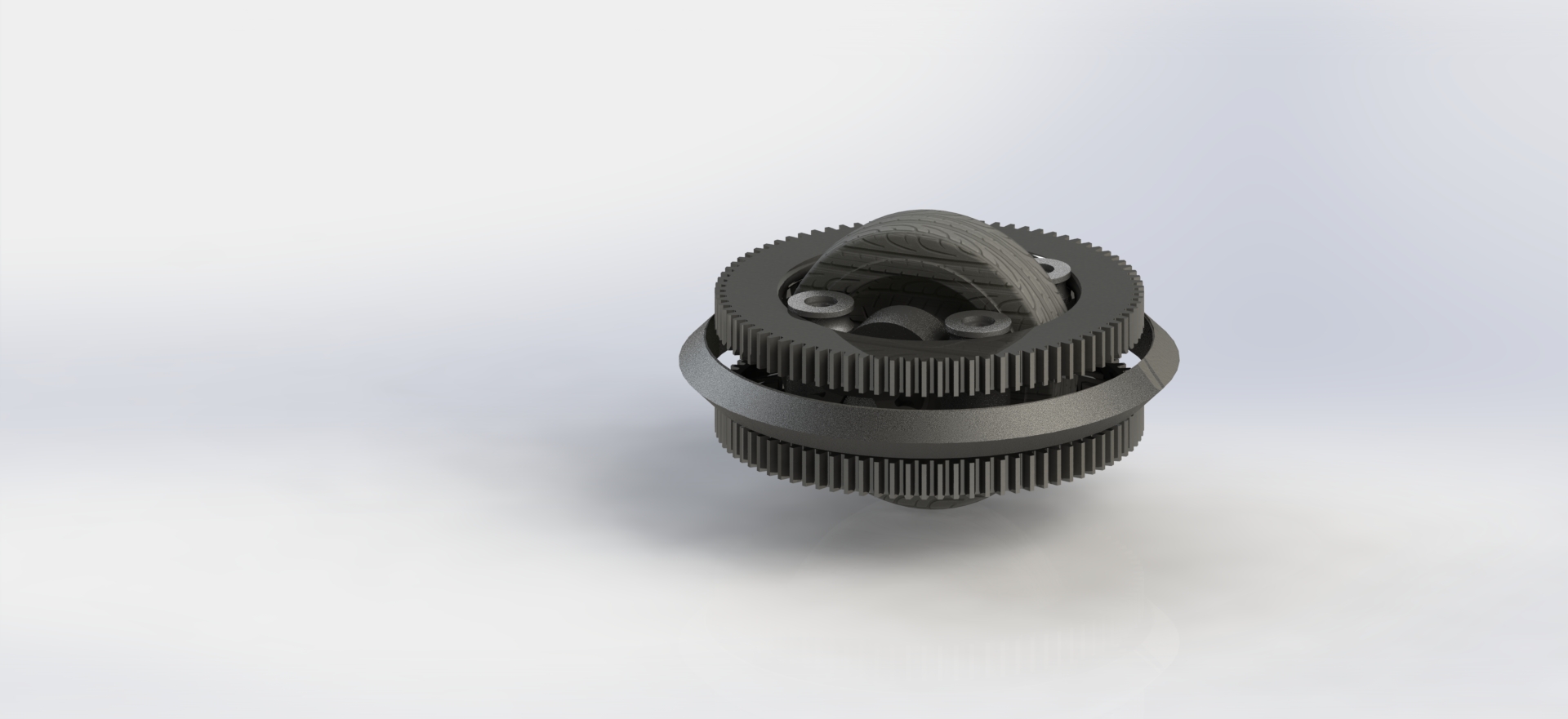
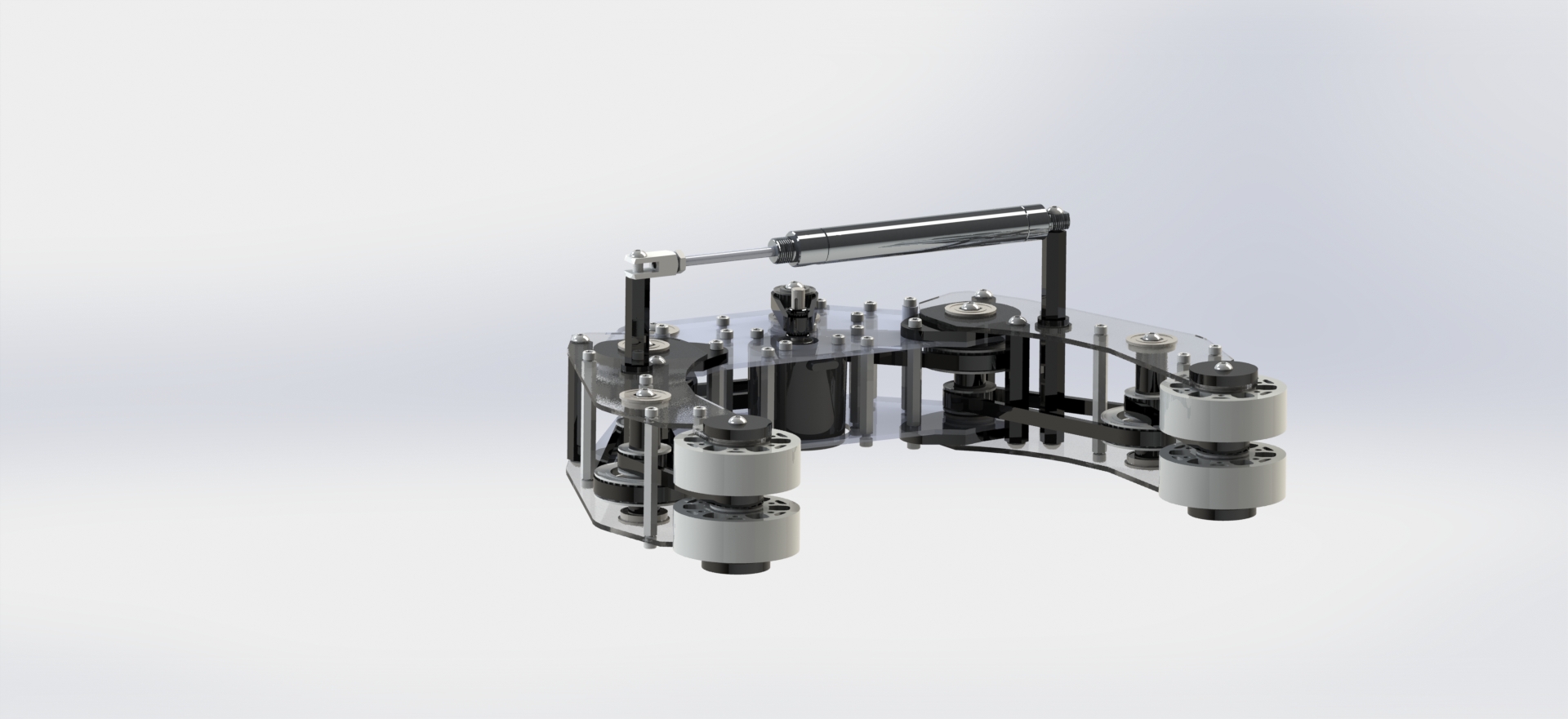
Differential Swerve Module
Dual-input differential gear system enabling independent wheel steering and drive through bevel gear torque vectoring across two rotational axes.
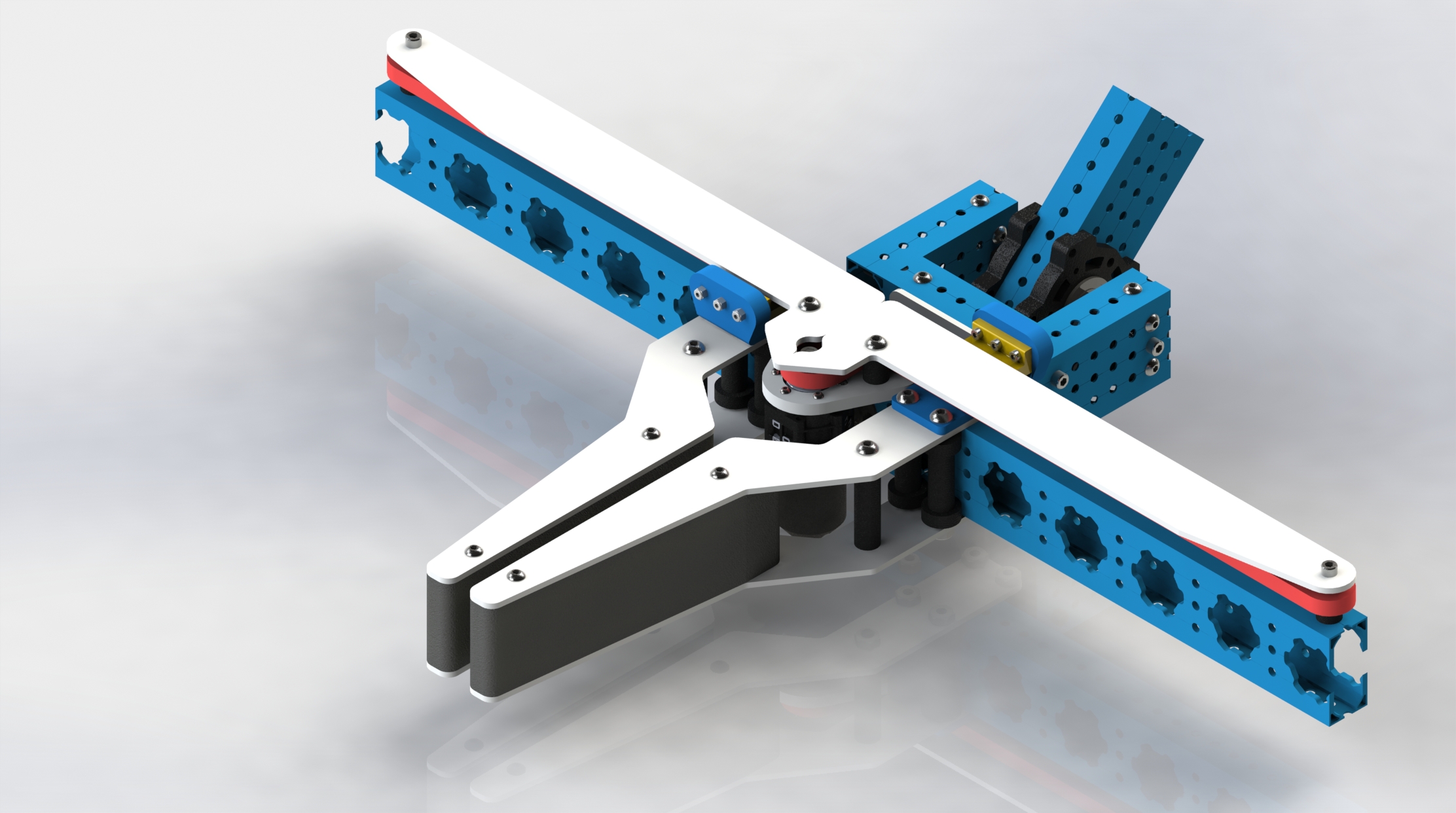
3 DOF End Effector
Linearly actuated robotic claw with servo-driven pitch/roll articulation and chain-sprocket extension on a Delrin bearing carriage.
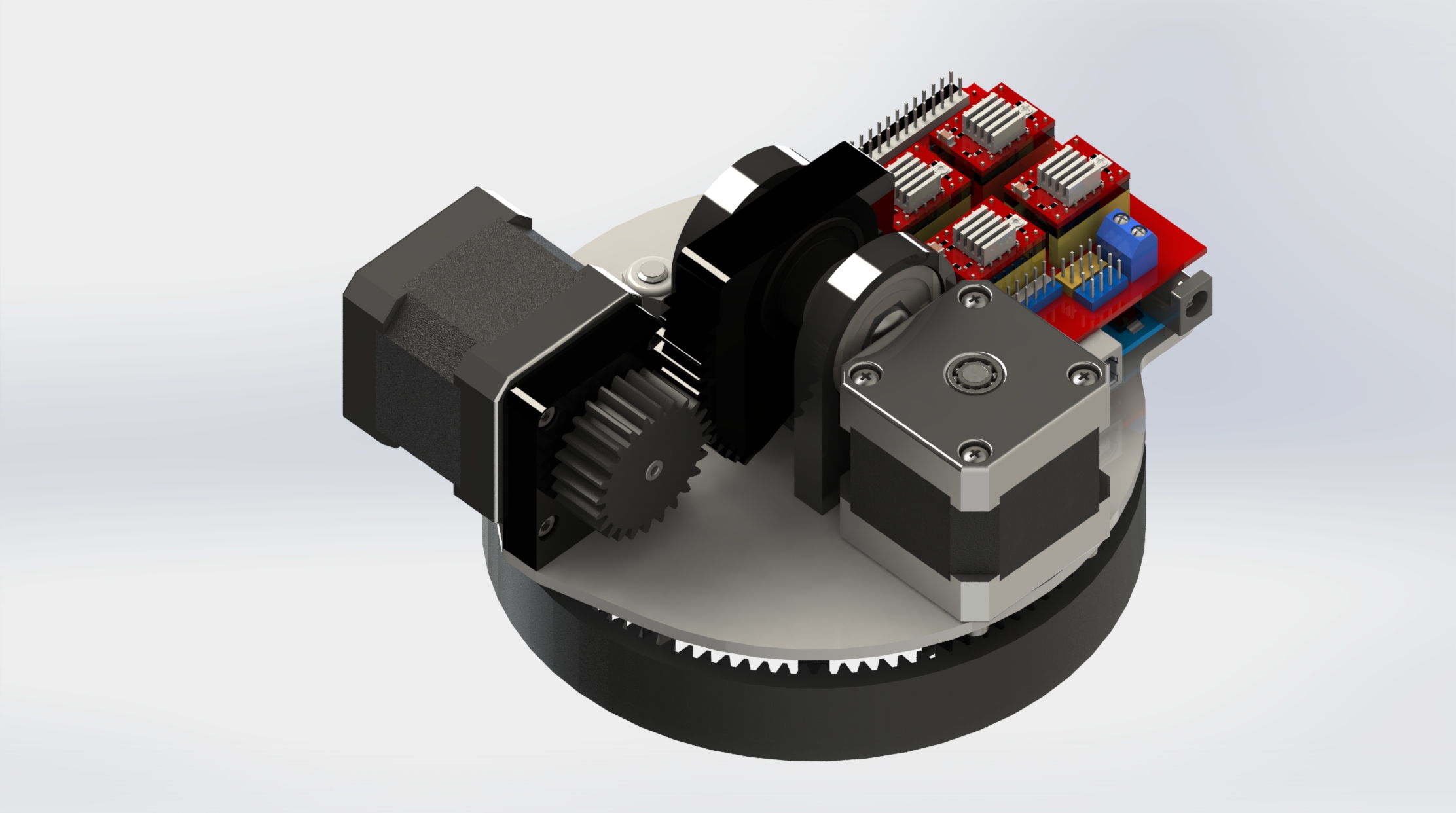
3D Printed Turret
Additively manufactured 2-DOF pan-tilt platform using discrete-step stepper motor control for precision azimuth and elevation positioning.
Roller Claw
Hybrid pneumatic-electric intake mechanism with compliant silicone roller contact surfaces for multi-geometry game piece acquisition.