This versatile and adaptive robotic device was designed specifically for the FRC 2019 game. The Roller Claw is a unique combination of pneumatics and electric motors, which allows it to securely grasp and manipulate both disks and balls.
The main goal for the Roller Claw was to create a mechanism that could easily handle the game pieces in the FRC 2019 game, which included both disks and balls. I knew that I needed a design that would not only be effective in picking up the pieces but also quick and efficient in doing so.
I started by researching various methods for grasping objects, and I came across a concept called “roller grasping.” This method caught my eye because it allowed for a secure grip on objects without applying excessive pressure or causing any damage. I decided to give it a shot and began sketching out designs for the Roller Claw.
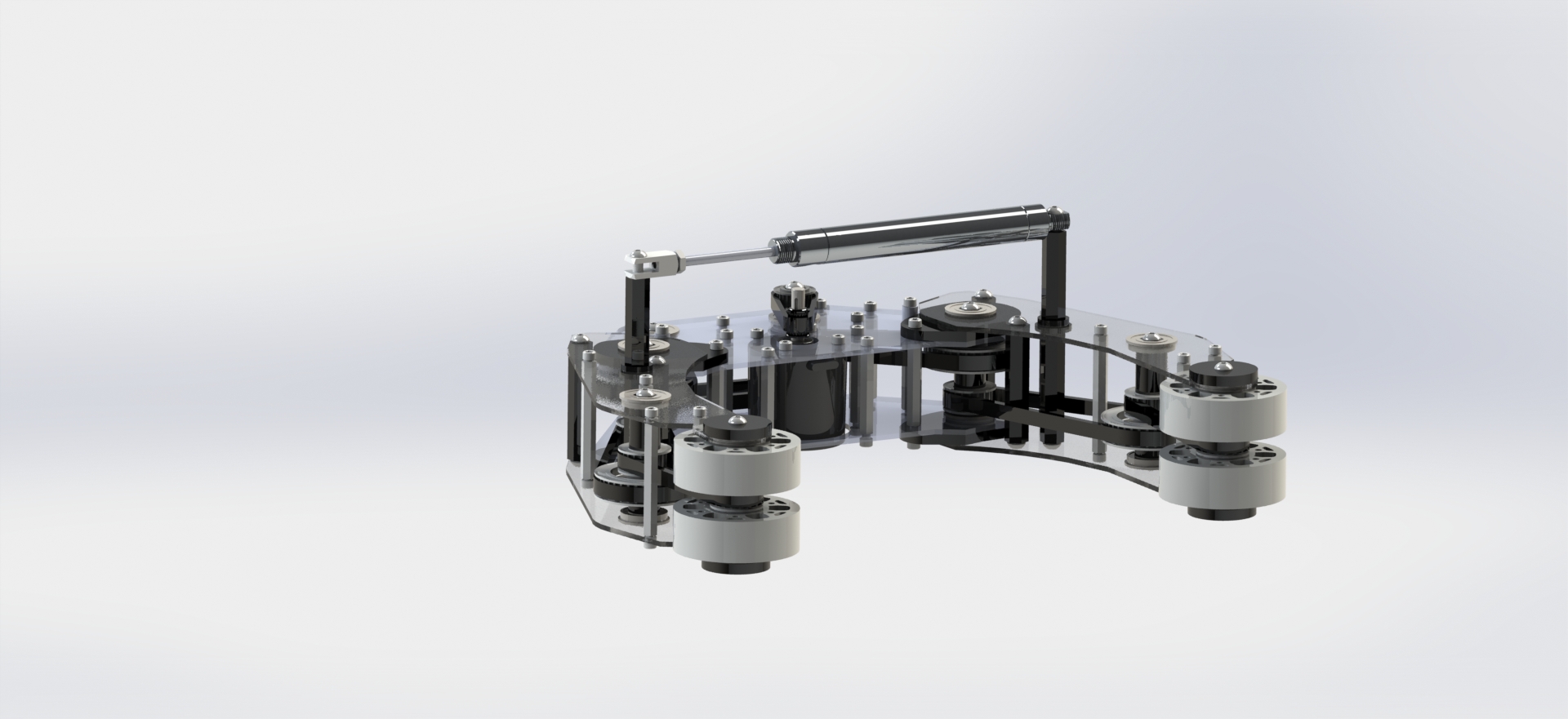
The first step was to create a frame that would house the roller mechanism. I opted for a lightweight polycarbonate frame for durability and ease of attachment to the robot. The frame is designed to hold two sets of rollers - one for disks and the other for balls - which can be easily interchanged depending on the game’s requirements.
Once the frame was designed, I began working on the roller mechanism itself. I chose to use soft silicone rollers to provide maximum grip on the game pieces while minimizing the risk of damage. I experimented with various roller shapes and sizes until I found the perfect combination that allowed for smooth and efficient grasping of both disks and balls.
To power the Roller Claw, I decided to use a combination of pneumatics and an electric motor. The pneumatics system is responsible for opening and closing the rollers, while the electric motor provides the necessary torque to rotate the rollers and secure the game pieces. This combination of actuation methods allows for a fast and reliable grasping mechanism that can easily adapt to the different shapes and sizes of the game pieces.
As with any engineering project, there were some challenges along the way. One of the main issues I encountered was finding the perfect balance between roller grip strength and the speed at which the rollers rotate. I had to experiment with various motor and pneumatic configurations to find the right combination that met both requirements. After a few iterations, I finally managed to optimize the system, and I’m incredibly proud of the final result.